Stepper motors are actually multiphase motors. The more the coils, the more the phases. The more the phases, the smoother the operation of the motor and the higher the price. The torque is irrelevant to the number of phases. The most common type of stepper motor is the two-phase. Two phases, is the minimum number of phases needed for a stepper motor to operate. What you need to make clear here, is that the number of phases does not necessarily set the number of coils. If for example each phase has 2 coil pairs, and the motor is a 2-phase motor, the number of coils will be 8. That has to do only with the mechanical characteristic of the motor. To simplify things, i will explain the simplest 2-phase motor with one coil pair per phase.
There are basically 3 different connection types for a 2-phase stepper motor. The coils are interconnected and according the connection, a different number of wires are used to connect the motor to the controller.
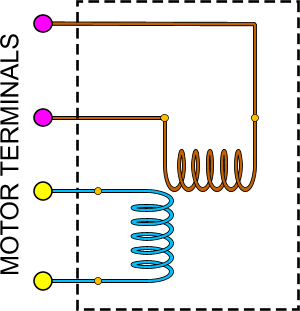
Bipolar motor
This configuration is the most simple. 4 wires are used to connect the motor to the controller. The coils are internally connected either in series or parallel. This is an example of a bipolar stepper motor:
The motor has 4 terminals. The two yellow terminals (the colors i use are NOT according to standards!!!) are for powering the horizontal coils, while the two purple terminals are for powering the vertical coils. The problem with this configuration is that, if someone wants to change the magnetic polarity, the only way to do this is by changing the current direction. This means that the driver circuit will have to be complicated, for example with a H-bridge.
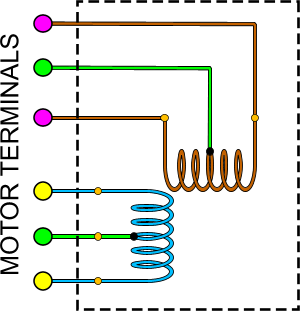
Unipolar motor
In a unipolar motor, a common wire is connected to the point where the two coils are connected together:
A unipolar motor with 5 terminals
With this common wire, the magnetic poles can now easily be changed. Suppose for example that we connect the common wire to the ground. By powering once the first end of the coil and once the other end, the magnetic poles are changed. This means that the circuit for a bi-directional motor application is very simply, usually with only two transistors per phase. A major drawback is that, each time, only half of the available coil windings are used. This is like the motor is driven with single-coil excitation. Therefore, the torque generated is always about half the torque that would have be generated if both coils were powered. In other words, unipolar motors needs double the space as a bipolar motor, to provide the same torque. The unipolar motor can be used as a bipolar motor, simply by leaving the common wire unconnected.
Unipolar motors may have 5 or 6 terminal wires. The drawing above demonstrates a unipolar motor with 6 wires. There are situations though, that the two common wires are internally connected. In this case, the motor will have 5 wire terminals.
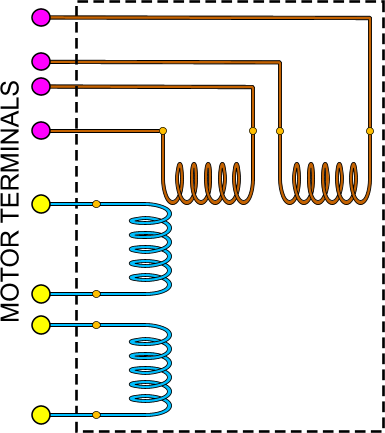
8-lead stepper
This is the most flexible stepper motor in terms of connection modes. All coils have wire terminals for both sides:
This motor can be connected with any connection possible. It can be connected as a 5 or 6 leads unipolar, as bipolar with series windings, as bipolar with parallel windings, or as bipolar with single winding per phase for lower current applications.
Dear sir,
Thank you for gave the information about stepper motor works.
I understood the principle of working with the help of animation.
Regards,
G.Parthiban, Kalpakkam.
At 20 October 2015, 11:46:29 user Mike D wrote: [reply @ Mike D]
Awesome, thank you. I did find it just a bit slow for me but that is because I knew some of this before coming here.
That said it has given me a great deal of new knowledge and insight that will help me connect up my first stepper motor and have it actually work.
Thank you again.
Great tutorial! I suggest you slow the animations down, perhaps leaving a 3 second interval between steps. As it is now, it is visually difficult to keep up with each step of the sequence and study how the current flows through each winding.
Thanks for your efforts.
Dear Giorgios,
Fantastic explanation and didatics! I disassembled a disquette drive and found a very strange looking motor inside. Now I know it`s a stepper motor. Could you please inform with what software you designed the 2 demo videos?
I have a bunch of stepper motors that have failed. When installed in the machine they just vibrate back and forth. I know it is the motor because when I put in a new motor they machine works just fine.
Do you think there is anyway to repair these stepper motors?
It is a Hybrid .9 degree NEMA 23. Do you think a coil shorted or is it something to do with the magnetism? Or??
Thanks
Russ
At 25 January 2013, 0:46:08 user Bojar wrote: [reply @ Bojar]
Your explanation makes this so clear...Thanks!
At 1 January 2013, 10:27:48 user swamy wrote: [reply @ swamy]
u explanation is just awesome.thanq for giving valuable inf.
VERY GOOD PRESENTATION FOR BASIC CONCEPT FOR STEPPER DRIVE.
PLEASE GUIDE US FOR BIPOLAR STEPPER DRIVE & UNIPOLAR DRIVE.
IS BIPOLAR DRIVE WORK ON UNIPOLAR.
WHAT IS THE DIFFERENCE IN BIPOLAR & UNIPOLAR
YOUR GUIDE LINE IN THESE MATTER WILL BE HGIHLY APPRECIATED.
At 24 September 2012, 23:36:38 user truk wrote: [reply @ truk]
OK that animation mid-page on the right finally clicked in for how real steppers work and how you can get to smaller steps. All the beginner diagrams only show 4 poles and compass style rotors with giant 90 deg steps. that animation is fantastic, thanks so much!
At 19 September 2012, 14:10:43 user brijesh wrote: [reply @ brijesh]
@Vimee Bakori first disconnect completely the wires from the motor. You will need either 4 multimeters, or 4 LEDs or other source of light. Then , you must see between each of the 4 wires and the ground a pulse. The pulse must follow the pattern of a full or half step as explained in this article.
At 16 August 2012, 13:35:39 user John wrote: [reply @ John]
Good Day and Many Congrats for your presentation!
One question pls...
In a step motor with 4 wires (1=R, 2=S, 3=T AND 4=COMMON ),
how can measure by multimeter the voltage in order to understand if signal is correct?
i.e. I can measure sometimes 31V Only to one of three cables, or only to 2 of 3, or to all 3 cables...
How is the constraction of 4 wire motor with common ?
You definitely were born to be a teacher. What a great elementary style tutor in stepper motors. I actually understand how they work now. Something I thought I would never understand.
@Stefan
1. Depends on the stepper. For example, one stepper may have 5 ohms coils. Then, you will measure 5 ohms between the sides of the coil, and 2.5 ohms between one side and the middle wire.
2. You don't need to recognize them, they are bipolar motors. Only bipolars have 4 wires.
3. As i said in point 1, a 5 (or 6) wires motor has 2 coils. So, you must find one big and one small resistance between the coils. When you measure the resistance and you find the "big" resistance, then you are sure that you are holding the ends of the coils. Now be careful!!! If the motor has 5 wires, this means that the middle coils are internally connected! What this means is that you may find a big resistance between the ends of ONE coil, or between the ends of the 2 coils!!! That will trick you. No matter what, big resistance comes only from end-side of coils. Small resistance (which is half the big resistance) means that one wire is the middle.
Hi there,very good explaining about the stepp motors and how they work.I have 3 questions about them.
1.If I messure resistance on the coils,what I will get?
2.I have 2 stepp motors,they have 4 wires.And how can I recognize them?
3.The common pin how I can recognize it from the others,is there any resistance or something like that so I can recognize it?
Thank you
I really appreciate your presentations. I happen to be a experimental biologist student, and wanted to understand dc and stepper motors so i could understand what is to be believed the mechanism of bacterial flagella.
Your information is priceless.
Dont worry about your accent, should someone not like it they can look elsewhere for the knowledge they seek.
Thank you.
@Terje damn i saw your post in the forum and totally forgot to answer. I will answer in the forum asap.
http://pcbheaven.com/forum/index.php/topic,1159.0.html

 Home
Home
 Projects
Projects
 Experiments
Experiments
 Circuits
Circuits
 Theory
Theory
 BLOG
BLOG
 PIC Tutorials
PIC Tutorials
 Time for Science
Time for Science

 Contact
Contact
 Forum
Forum
 RSS
RSS


 Reddit this
Reddit this

